
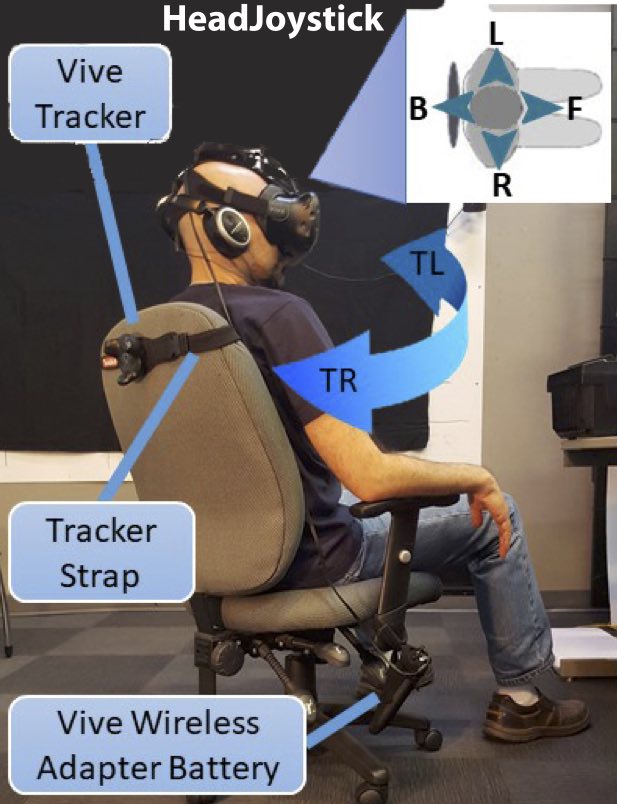
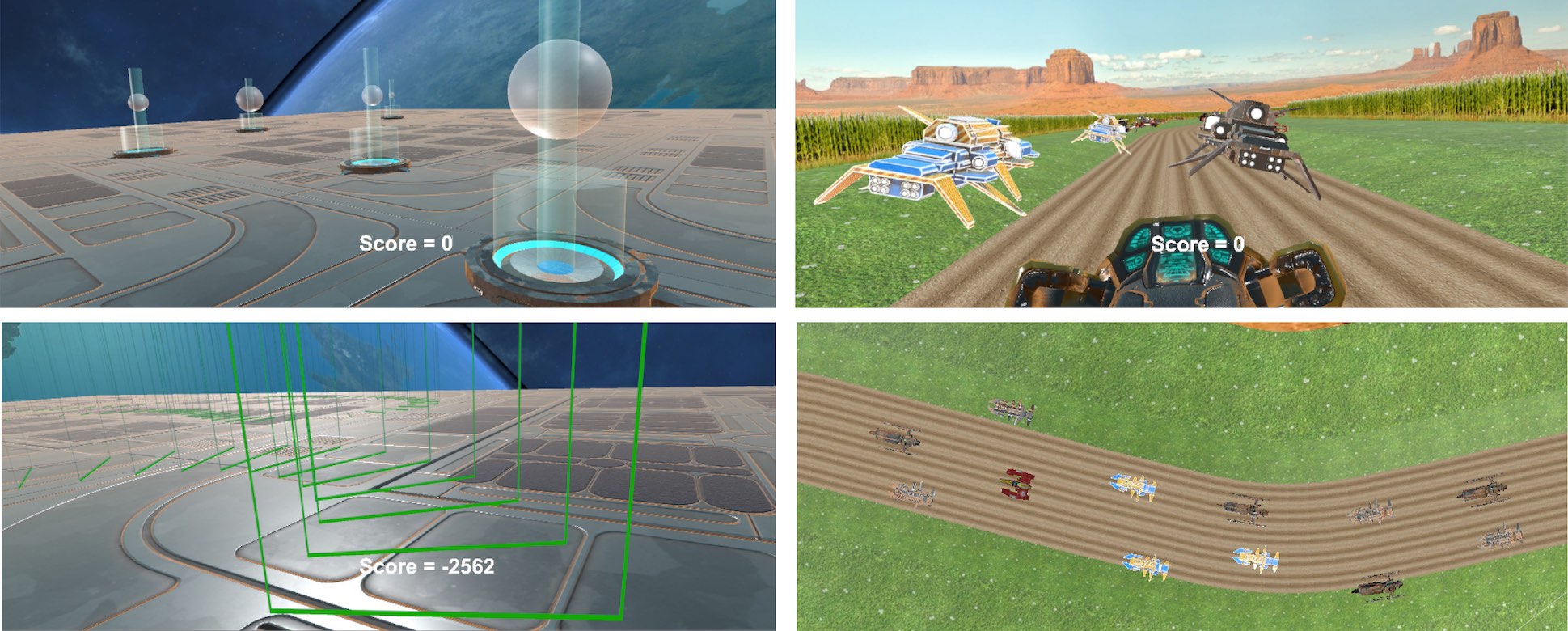
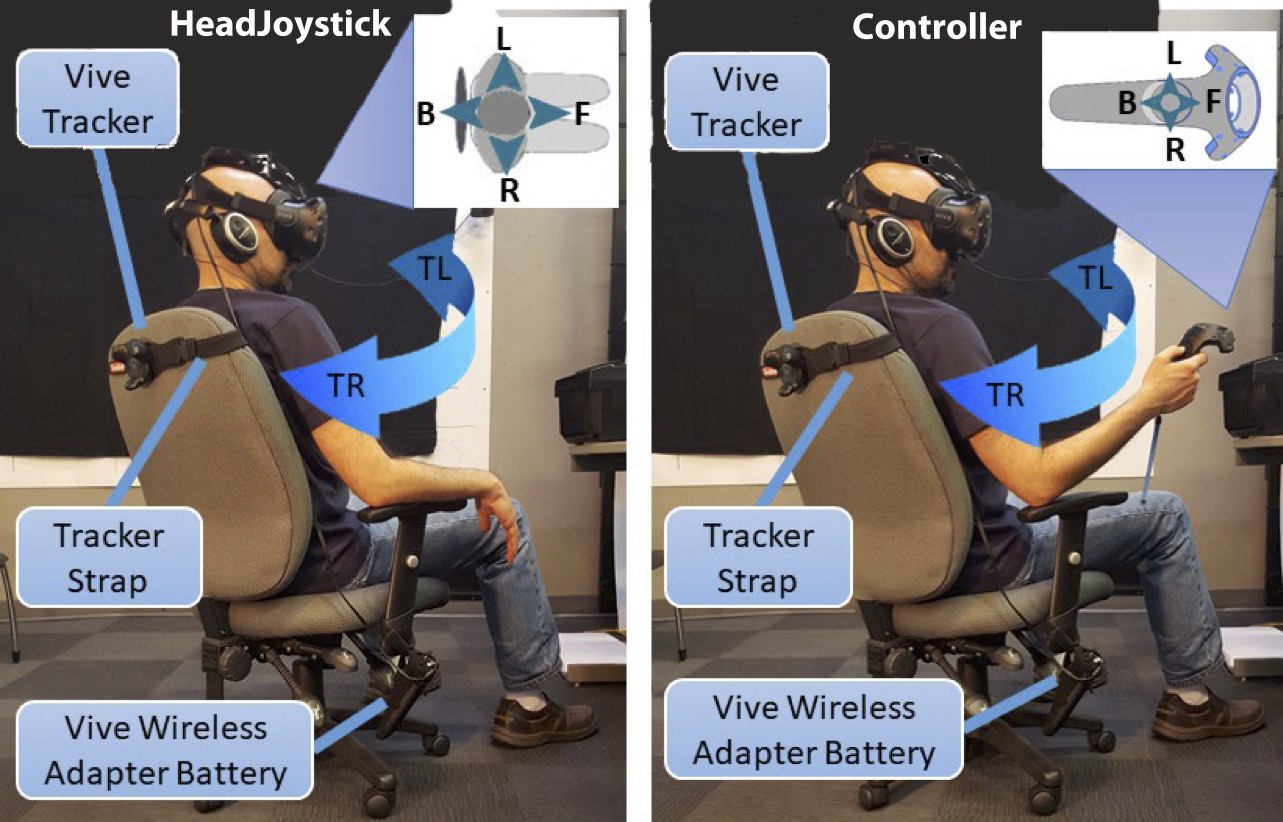
Hand-held VR controllers are widely available and used, however they can contribute to unwanted side-effects, such as increased cybersickness, disorientation, and cognitive load. Here, we show how a leaning-based interfaces (“HeadJoystick”) can help improve user experience, usability,and performance in diverse ground-based navigation including three complementary tasks: reach-the-target, follow-the-path, and racing (dynamic obstacle avoidance).
Publications
Hashemian, Abraham M., Ashu Adhikari, Ernst Kruijff, Markus von der Heyde, and Bernhard E. Riecke. 2021. “Leaning-Based Interfaces Improve Ground-Based VR Locomotion in Reach-the-Target, Follow-the-Path, and Racing Tasks.” IEEE Transaction on Visualization and Computer Graphics TVCG, 1–22. https://doi.org/10.1109/TVCG.2021.3131422. (Download)
Below are videos explaining the tasks, stimuli and methods used
Reach-the-target task
using Controller 
using HeadJoystick 
Follow-the-path task
using Controller 
using HeadJoystick 
Racing (dynamic obstacle avoidance) task
using Controller  .
.
Study 3 reach-the-target task (with optional brake)
using Controller 
using HeadJoystick 
using HeadJoystick with Brake 