
Collaboration between the iSpace lab at SIAT and Mechatronics Undergraduate Interns to design and build a unique, virtual reality multi-modal motion simulator
The iSpace program is centered on investigating what constitutes effective, robust, and intuitive human spatial orientation and behaviour. This fundamental knowledge will be applied to design novel, more effective human-computer interfaces and interaction paradigms that enable similar processes in computer-mediated environments like virtual reality (VR) and multi-media.
To tackle this ambitious agenda, we had to design and build our own flexible research apparatus, which consists of a motion chair mounted on top of a “circular treadmill” (see illustrations/video below), which allows us to physically rotate participants and/or elicit compelling self-rotation illusions induced by biomechanical cues from stepping along with the rotating turntable.
To design and build such a setup (which is commercially unavailable), we started a highly fruitful collaboration with several professors in Mechatronics and employed three Mechatronics 3rd year undergraduate students as part of a co-op placement and later as RAs. Together, we started to iteratively design, build, and evaluate a worldwide unique multi-modal VR lab for perceptual/behavioural experiments (see pictures below). The first challenging part, the construction of the circular treadmill-based motion simulator was successfully completed in 2010. This included the design and 3D modeling of the mechanical components in solidworks including simulation and stress testing as well as the selection and integration of the electronics, motors, control, gears, etc. and basic interfacing to a control computer.







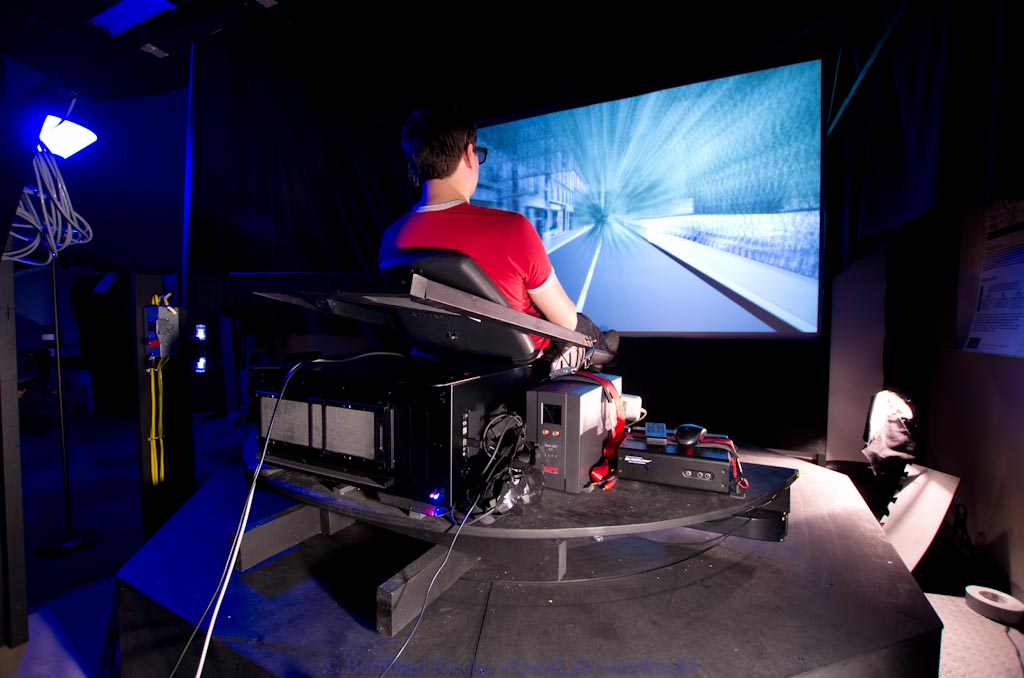




Together with my graduate students, we are currently extending and refining on the 3D visual, 3D auditory, and subsonic/vibrational simulation. Below is a short video of a simulated ride through a virtual city that uses the inner axis to rotate the participant to match the visually simulated orientation in the virtual environment. Note that the outer axis (ring) isn’t used in this demo.

Biomechanical vection demo video: Stepping along the rotating floor of our Virtual Reality Simulator can (after a few seconds) induce the compelling sensation that not the floor, but oneself is rotating. We are currently investigating how best to use such self-motion illusions (“Vection”) to improve Virtual Reality interfaces to make simulated self-motions more believable.
Driving and flying through a procedurally generated virtual city using Gyroxus motion chair: You control the Virtual Reality simulated motion by simply leaning into the direction of intended travel.

Biomechanical Vection Demo: This was the very first test of our circular treadmill: A blindfolded participant is sitting stationary while stepping along the rotating floor. After some time (the “vection onset latency”), the participant experiences illusory self-motion (“circular vection”) in the direction opposite to the floor rotation, as if he is moving and the floor is slowing down and eventually becoming earth-stationary:

[just for fun: iSpace Simulator Demo Video: Jay was jamming along on his sympathetic guitar while Salvar was driving/flying through a procedurally generated virtual city.

Collaborators
Mechatronics 3rd year undergraduates
- Etienne Naugle
- Adam Hoyle
- Anton Brosas
Between December 2009 and Fall 2010, They did all the main work of designing, simulating, building, and testing the circular treadmill, as illustrated in the CSME student design competition paper.
Graduate Students (SIAT):
- Daniel Feuereissen (co-supervision and collaborator since the project start)
- Salvar Sigurdarson (interfacing circular treadmill with control computer, since Fall 2010)
- Andrew Milne (3D sound and vibration simulation, motion chair, since Fall 2010)
- Amir Aziz and Mark Nazemi (video production of intro video and video tutorial of circular treadmill, Fall 2010)
Supervisors
- Prof. Bernhard Riecke (SIAT, supervisor and project leader)
- Prof. Gary Wang (Mechatronics, co-supervisor)
- Prof. Siamak Arzanpour (Mechatronics, co-supervisor)
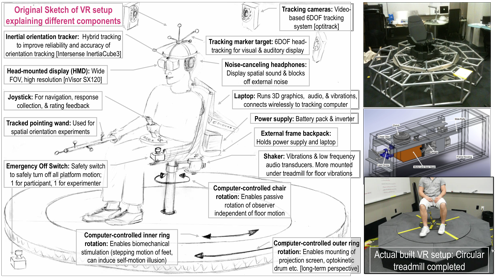
Initial sketch of envisioned setup

First circular vection tests on our new platform
Related Publications
Sorry, there’s no items to display.